Key Takeaways:

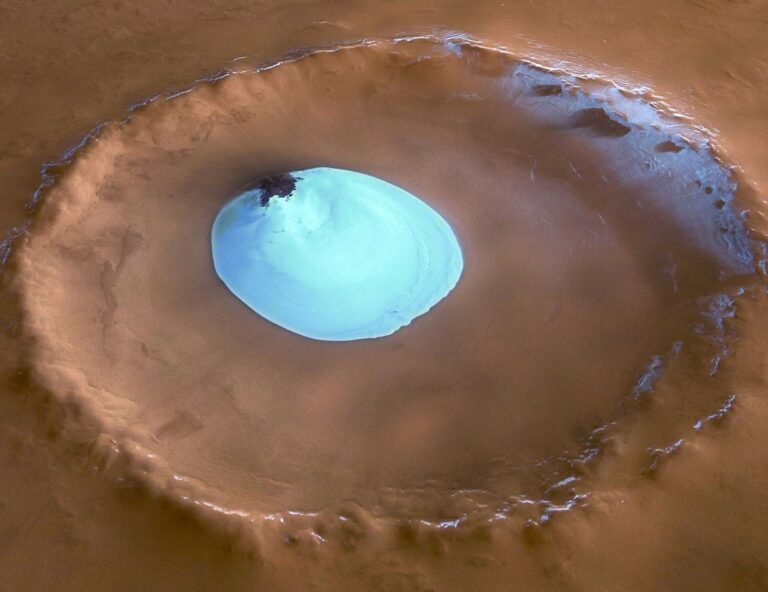
The solar system is awash with oceans. Unlike the majority of Earth’s seas, these ubiquitous brines are locked away beneath ice crusts. But they’re there, lurking under the surfaces of Ganymede, Europa, Enceladus, and perhaps other worlds like Titan, Dione, and Pluto. These maritime sites may provide the best venues for life beyond Earth, but getting to them is the tricky part. In the case of Jupiter’s ice moon Europa, its 60-mile-deep (100 kilometers) ocean ebbs and flows beneath miles of solid ice, which blocks direct access.
Many engineers now believe that the best way to search for life in these deep waters is to deploy a modern-day Nautilus. But sending a probe to Jupiter’s moon, and safely down to the surface, through the ice, and into the ocean, is a daunting prospect to say the least.
It’s just the kind of prospect that fires the visions of engineers, and a few brave souls are taking the vision beyond imagination and into the practical world. One of them is William Stone, the founder of Stone Aerospace, a Texas-based company that develops both the tools and systems needed to explore the modern frontier of space. Recently, Stone led a team atop Alaska’s Matanuska Glacier. There, engineers tested a cryobot (a robot that can penetrate ice) called the Very deep Autonomous Laser-powered Kilowatt-class Yo-yoing Robotic Ice Explorer (VALKYRIE). VALKYRIE is one of many submersible robotic explorers that engineers are studying, hoping one day to investigate the oceans of other worlds.

As a target for any kind of probe, including a submarine, Europa presents some formidable roadblocks. Jupiter’s ice moon contains the most extensive ocean known in the solar system, but its location presents problems for future explorers. Temperatures are bitterly cold, and distances for communication with Earth are daunting, too. The ice crust capping the ocean may be 18 to 30 miles (30 to 50 km) thick, and once any probe arrives at the ice-sea boundary, it must safely deploy its submarine. Says Stone, “It’s a very tough problem. At Europa, you’re operating at 100 kelvins, in a hard vacuum. Most techniques for getting into that ice with a drill or a melt probe are not going to work.”
Engineering firms have approached the ice crust problem in a host of ways. Drills are efficient only to certain depths, and debris often fouls the mechanism or fills the tunnel left behind, blocking the probe’s signals to the surface. Other designs have tried using heating elements to melt through the ice. But as water fills the column behind the probe, it freezes and again blocks radio signals, and the power needed to melt through may be prohibitive. Another approach heats water and pumps it through jets to melt the ice ahead, though the refreezing water behind the probe is still a problem.
Stone Aerospace came up with a different solution. Its VALKYRIE probe operates neither by drilling, nor by hot water. Instead, a laser takes advantage of the fact that “certain frequencies transmit power through liquid water, and yet absorb through ice,” Stone explains.
Last year, Stone Aerospace built the first laser-powered ice penetrator, on a probe called Archimedes. The Archimedes system effectively takes the light of an industrial laser operating at 1,070 nanometers and expands that into a collimated beam the width of the probe. “The vehicle needs to be long and skinny. Ultimately, you realize that this thing starts to look like a hot dog. Physics forces you to have the smallest possible diameter. You end up with a long train,” says Stone. As scientists carefully select the focal length of the laser optics, the probe can increase or decrease its rate of speed.
Other research groups have also drawn plans for planetary subs. Sweden’s Uppsala University is exploring a submersible the size of two soda cans, while Georgia Tech’s Icefin follows an elongated design. Britney Schmidt, an assistant professor in the School of Earth and Atmospheric Sciences at Georgia Tech, brought a team to drill a hole in Antarctica’s Ross Ice Shelf. The Icefin robot entered the water and descended to the ocean floor, following a flight profile identical to a baseline Europa mission. Louisiana State University is working on several projects, including the Sub-glacial Polar Ice Navigation, Descent, and Lake Exploration (SPINDLE). The autonomous cryobot melts through dense ice to explore the lake below. Plans call for SPINDLE to deploy a second-stage probe, called a hovering autonomous underwater vehicle (HAUV), into the water. Another LSU probe design, the Environmentally Non-Disturbing Under-ice Robotic Antarctic Explorer (ENDURANCE), can travel untethered under ice and create three-dimensional maps of its underwater surroundings. The probe can obtain samples of microbes, and it has already done so in an 80-foot-deep (25 meters) frozen lake in Wisconsin. Designers plan to soon send it to its next stop: a permanently ice-covered lake in Antarctica.
After flyby and orbital missions, the first surface probes to Europa will probably be stationary landers, perhaps outfitted with coring devices to sample the shallow ice. It’s a good start, but the chances of finding extant microbial life on Europa’s surface, or even within the first 10 feet (3 meters), are slim, given the radiation environment. “But if you can get through to the ocean,” says Stone, “that’s a whole different story.”
Stone’s cosmic hot-dog robot — or any other probe type — will follow a general four-step itinerary on its maritime journey:
Phase One: Getting into the ice. This problem has been approached using a variety of solutions, all with limitations.
Phase Two: The cruise. The entry borehole closes behind the descending probe as vapor pressure builds above.
Phase Three: Obstacle avoidance. Meteoritic impact debris that has worked its way down to random locations, or dense brine deposits, could end the mission.
Phase Four: Breakthrough. The probe delivers the submarine to the sea. As the submarine hits the ocean, how does it deploy? How does it communicate?
One of the most efficient ways to cut through the ice in a place like Earth’s polar caps is a hot water jet. The design is simple: Heat hot water in a diesel-fired burner, pump it down a hose to a weighted nozzle, and let the water jet out just short of boiling. “It cuts through ice like butter,” Stone says. This has been done successfully in Antarctica, but there is a problem: It takes 1,000 metric tons of equipment to deploy a hot water drill. How can a miniaturized cryobot pack enough power? Stone proposes using a 5,000-watt industrial laser as a power source. Engineers envision a laser on the lander that powers a microprobe, with the probe itself spooling fiber behind it. Other designs, like the VALKYRIE, would carry a nuclear power system on board. The laser power comes through an armored fiber optic cable. Designers have been able to fabricate a 12.5-mile-long (20 km) fiber spool that fits in a 1-quart bottle. Proof of concept was carried out by Stone Aerospace’s Artemis probe, which utilized a 9.3-mile (15 km) fiber optic spool.

This is critical to mission success, says Stone. “We don’t want to risk a $4 billion mission on something like a trash can-sized piece of rock and then you’re done.” With a tunable laser system, the pathway of the probe through the ice can be changed as the laser shifts its focus to one side.

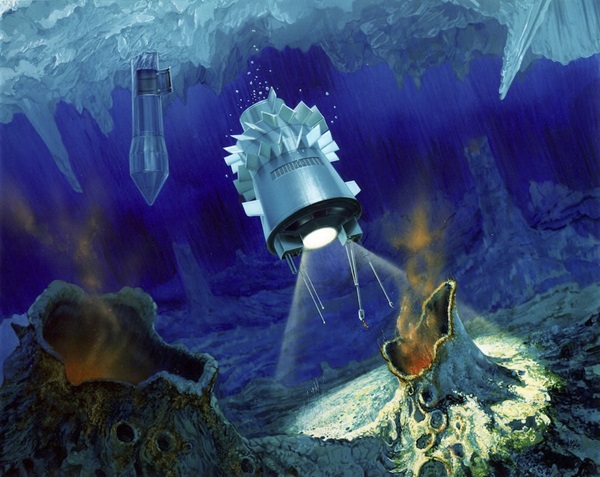
Once deployed in the ocean, the robot would map the seafloor, chart currents and chemical streams, and look for life. The cryobot could even be programmed to search for sources that may support living organisms.
For example, a plume with a higher sulfur content might indicate hydrothermal vents, so the probe would try to follow the sulfur trail back to its source. The next step would be to maneuver to that site, and look for changes in the background that would suggest the presence of microbial communities (such as mats or changing colors). The cryobot would then take close-up, high-definition video. Finally, a sample would be pulled into a microscope for confirmation and characterization of living systems.
With the remoteness of Jupiter’s system, the robot must think for itself. But how do we train it to recognize life? One possibility is to load a digital library of Earth’s microbial life architectures into its memory for comparison. Anything that moves within the probe’s field of view is then compared to various microbial structures and patterns. Because form follows function, microbes of other worlds should have some characteristics similar to those seen in the animal kingdom on Earth.
Getting around
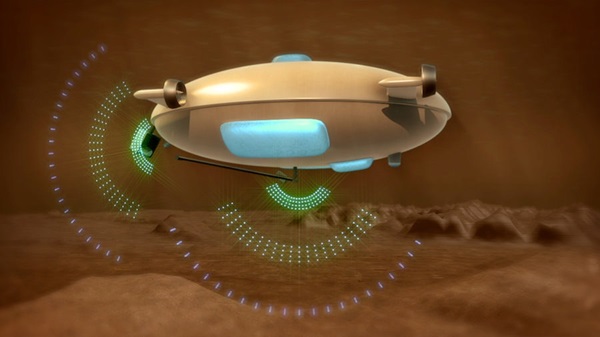
In addition to studying propellers, engineers have been creating propulsion systems based on life-forms in Earth’s seas. These biomimetic designs emulate the agility and mobility of biological forms.
The ocean’s inhabitants exhibit high-endurance swimming that outpaces current underwater propulsion systems for stealth, flexibility, and speed. For example, the glass knifefish (or “glassfish”) uses a single ventral fin, which runs the length of its entire body, to change direction or hover in place. Designers at the University of Edinburgh are working on SquidROV, a biomimetic submarine propulsion system that utilizes a glassfish-style fin to maneuver. Some engineers suggest that such a propulsion system is more efficient than a propeller-based system of equivalent thrust. The design also generates much less turbulence, making it ideal for research and observation of a host of marine conditions.

Researchers at Canada’s Dalhousie University have combined forces with McGill University and York University to create the AQUA robot. This aquatic vehicle is a hybrid, with the capacity to walk along the seabed as well as to “swim” using its legs.
Yet another approach, under study at the Jet Propulsion Laboratory, uses a buoyant robot that floats against the underside of ice, crawling or wheeling along upside down. There are many options available for underwater exploration, but considering the vast geological differences between the various watery worlds in our solar system, no single submersible vehicle is equipped to effectively explore every wet environment.

While Europa’s ice crust presents a barrier to its ocean (as does the crust of the geyser-spouting moon Enceladus, which orbits Saturn), one moon in the solar system has seas on its surface.
Saturn’s Mercury-sized moon Titan is shrouded in an orange haze. Since the 1960s, researchers have suspected that conditions on Titan’s surface were at the triple point of methane: Methane could exist as a gas, a liquid, and a solid (ice).
Earth’s surface is at the triple point of water, and it was tempting to see Titan as a cryogenic version of Earth’s coastal regions, with surf breaking on alien shores. But the actual conditions there were not known in detail. Studies for landing probes often included a spectrum of designs to accommodate thick or thin atmospheres, and surfaces ranging from rock or ice to snowbanks and liquid ponds.
With the arrival of the Cassini orbiter and the European Huygens probe in 2004, the true nature of Titan’s unique landscape became clear. Vast lakes of methane and ethane, rivaling the Black Sea in extent, wash across the northern hemisphere, with another huge body — Ontario Lacus — in the south. The largest of Titan’s hydrocarbon oceans is Kraken Mare, followed closely by Ligeia Mare. To Johns Hopkins University Applied Physics Laboratory’s Ralph Lorenz, it seems a perfect place for a submarine: “There are some aspects about Titan’s methane bodies that are actually easier for a submarine [than terrestrial seas] because hydrocarbons are not electrically conductive, so you don’t need to worry so much about exposed connectors. There’s a possibility that you can send a radio signal through the liquid, which is something you can’t do very easily on Earth. You might be able to have higher bandwidth. We know that at least one of Titan’s seas is very radio transparent, because we bounced Cassini radar off the bottom of it.”
But despite its advantages, Titan presents a new set of challenges for submersible design. The liquid is cold (94 K; –290 degrees F), so just staying warm will draw a large part of a probe’s energy and dictate its structure. Another problem is how Titan’s atmosphere reacts with its methane seas. On Earth, submarines can use air to fill their tanks and regulate buoyancy. But the nitrogen that makes up the majority of Titan’s atmosphere is soluble in liquid methane, so it has less power to make the sub buoyant. If designers use nitrogen for flotation, the gas will be effective only at limited depths. The other option is to use a noble gas, such as neon.
Nitrogen dissolved in methane presents another problem, Lorenz explains. “If you have a patch of your submersible which is leaking heat, you could raise the temperature of that liquid enough that it reduces the amount of nitrogen that can dissolve. Think how much CO₂ you can dissolve in water on Earth (imagine a soda bottle), and that’s the picture. You could get bubbles on [the outside of] your submarine. That’s not going to make the thing sink, but it reduces movement, and they might influence a side-scan sonar to image the seabed. This is a problem that just doesn’t happen on a terrestrial submarine.”

But a boat loses the ability to profile the liquid column to see if the mix of methane and ethane is stratified. Does Ligeia Mare have an ethane-rich layer 100 meters down at the bottom, something like the anoxic layer found at the bottom of the Black Sea? Researchers see evidence of evaporites — minerals left over after a body of water evaporates — on the shores of Titan’s seas, as if the seas have dried out and refilled a number of times over the course of Titan’s history.
That story is told in the layers of sediment, not only on the coastline, but also on the seafloor. It may be prudent to do some surface exploration of the seas with a boat first, something akin to the HMS Challenger expedition of 1872 to 1876. As part of the world’s first global oceanographic expedition, the Challenger crew sampled the seafloor by lowering a simple weight with a hole in the bottom before winching it back up. A Titan boat could explore the depths in similar fashion. But are these underwater explorers our best option for exploring the seas of other worlds like Titan?
Titan is a wonderfully alien world, but when it comes to the search for life, the majority of astrobiologists have their eyes set on other targets. Stone puts it this way: “The possibility of life on Europa and Enceladus is pretty good; it’s non-zero. Life acts like a battery. It needs electron donors, it needs electron receptors, it needs water, and it needs carbon. Those four constituents are likely to exist on Europa and Enceladus. Both are good targets. There are other ocean worlds out there, but by far and away, Europa is the one to cut our teeth on.”
Stone points out that a Europa flyby mission — NASA’s Europa Clipper — is fully in motion and set for launch sometime between 2022 and 2025. Further-more, a proposed lightweight companion craft, named the Europa Lander, is currently accepting instrument proposals. So, although researchers would love to explore the seas of Titan, Europa will likely be the first world to have its water appraised. Either way, the pieces seem to be falling into place for a voyage to the bottom of an alien sea.
Frequent Astronomy contributor Michael Carroll featured planetary submarines in his latest scientific novel, Europa’s Lost Expedition (Springer, 2017).