The activities confirmed good health and usefulness of the Mars Hand Lens Imager (MAHLI) and used that camera to check arm placement during several positioning activities.
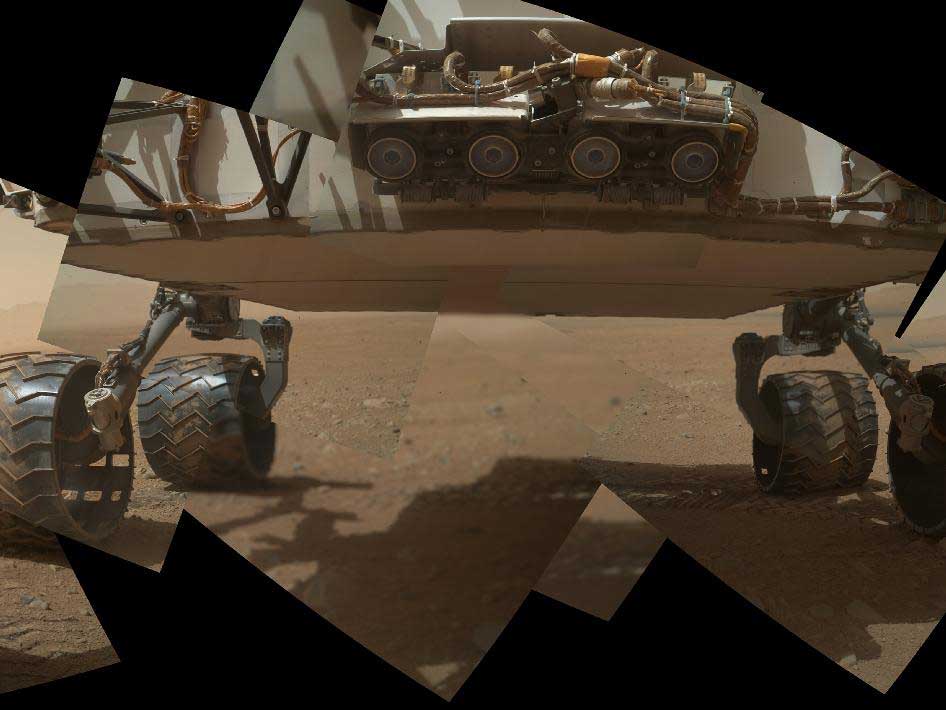
MAHLI took an image with its re-closable dust cover open for the first time on Mars, confirming sharp imaging capability that had been obscured by a thin film of dust on the cover during previous use of the camera. It took images of cameras at the top of Curiosity’s mast, of the underbelly of the rover, and of MAHLI’s own calibration target, among other pointings.
“Wow, seeing these images after all the tremendous hard work that has gone into making them possible is a profoundly emotional moment,” said MAHLI principal investigator Ken Edgett of Malin Space Science Systems, San Diego. “It is so exciting to see the camera returning beautiful sharp images from Mars.”

“The folks who drive the rover’s arm and turret have taken a 220-pound arm through some very complex tai chi, to center a penny in an image that’s only a few centimeters across,” said MAHLI Deputy Principal Investigator Aileen Yingst of the Tucson-based Planetary Science Institute. “They make the impossible look easy.”
The arm characterization activities, including more imaging by MAHLI, will continue for a few days before Curiosity resumes driving toward a midterm science destination area called Glenelg. In that area, the rover may use its scoop to collect a soil sample, and later its drill to collect a sample of powder from inside a rock.
Curiosity is five weeks into a two-year prime mission on Mars. It will use 10 science instruments to assess whether the selected study area ever has offered environmental conditions favorable for microbial life.