Like a supermodel sauntering across a Milan catwalk, showcasing the latest fashion, a robotic prototype recently crept across a floor, displaying future exploration technology. If this latest robotic “fashion” develops, current exploration technology will seem as outdated as tie-dyed shirts and parachute pants.
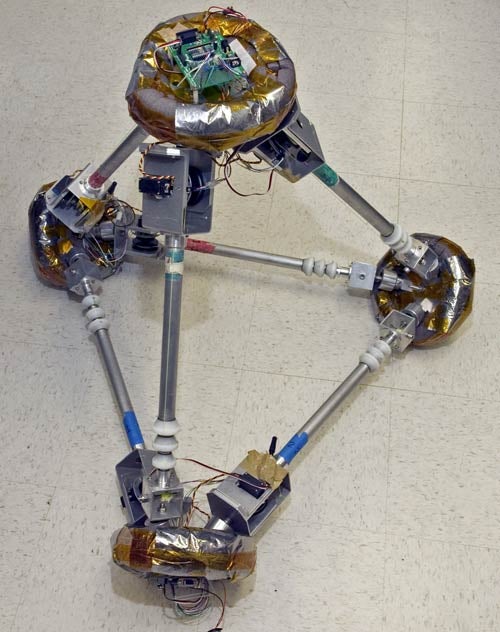
On March 16, a robot, a TETwalker edged across the floor at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. The prototype earned its name because it resembles a tetrahedron – a pyramid with 3 sides on a base. Electric motors are found at each corner of the pyramid. These pivoting nodes are connected to telescoping struts. By expanding and contracting the struts, the TETwalker maneuvers with great flexibility.
Eventually, team members will miniaturize and physically link TETwalkers into “Autonomous NanoTechnology Swarms” (ANTS). Through this team effort, the swarm will alter its shape to slither over rocky terrain and construct communications antennae and solar sails. One example of this potential flexibility would be the swarm’s ability to “grow” an antenna to transmit unexpected findings back to Earth. However, it is the maneuverability of the team that can best aid exploration at this point.
“If current robotic rovers topple over on a distant planet, they are doomed – there is no way to send someone to get them back on their wheels again,” explains Steve Curtis, principal investigator for the ANTS project. “However, TETwalkers move by toppling over. It’s a very reliable way to get around.”
“Spacecraft are so expensive because failure in a single component can cripple the entire spacecraft, so extensive testing and redundant systems are employed to reduce the chance of catastrophic failure. We wouldn’t live long if our bodies worked like this. Instead, when we get hurt, new cells replace the damaged ones. In a similar way, undamaged units in a swarm will join together, allowing it to tolerate extensive damage and still carry out its mission.”
In January 2005, the prototype was tested under the extreme conditions at McMurdo Station in Antarctica. From this rigorous trial, ANTS team members determined to move the motors to the center of the struts. This provides the TETwalker with greater flexibility and increases its reliability.
Engineers hope to provide TETwalkers with the ability to autonomously maneuver. To do so, the robots will have to combine decision-making with function and adapt and respond to unexpected changes in environment.